Autonomous Robotics and Vehicles Have Hit a Pothole
Our fast-paced world demands ever increasing levels of machine autonomy — accurately and safely seeing and understanding the environment around us has never been more important

However, autonomous machines have not progressed at the rate expected for several reasons including, the ability to navigate safely in dynamic environments , overlooking semantic and geographic signals resulting in safety incidents, and the inability to see clearly in poor weather conditions.
In this series of blogs Visionary Machines co-founder and computer vision expert Dr Samson Lee looks at the challenges faced by autonomous machines to-date, and how advancements in vision system technologies are addressing these issues. Dr Lee addresses the questions; how much do they really need to be able to see, and what do the advancements in 3D computer vision and rapidly advancing vision systems mean for machine autonomy in 2024 and beyond.
Part 1
Ways autonomous systems can navigate and understand their surroundings
— 2D vs 3D localisation and mapping
Autonomous machines need to be able to navigate in a wide range of industries and scenarios, they must be able to see in inclement weather and challenging conditions including offroad.
Simultaneous Localisation and Mapping (SLAM) plays a crucial role in enabling robotic and autonomous systems to navigate and understand their surroundings. SLAM involves calculating the position and orientation of the robot relative to the world, at the same time as building up a map of the space around, in 2 dimensions or in 3 dimensions. The choice between 2D and 3D SLAM depends on the complexity of the environment and the specific requirements of the robotic system. In this blog post, we delve into the distinctions between 2D and 3D SLAM, highlighting their respective strengths and applications.
In simpler environments, where the demands for spatial awareness are less intricate, 2D SLAM may be a practical and effective solution. Generating a 2D map requires less processing power compared to generating a 3D map, but assumes the ground is flat. 2D SLAM is commonly used in robotic vacuum cleaners that operate within confined indoor spaces. These devices typically navigate through relatively homogeneous and controlled environments, so a 2D map is enough to provide reliable navigation without the need for the additional complexity introduced by 3D mapping.
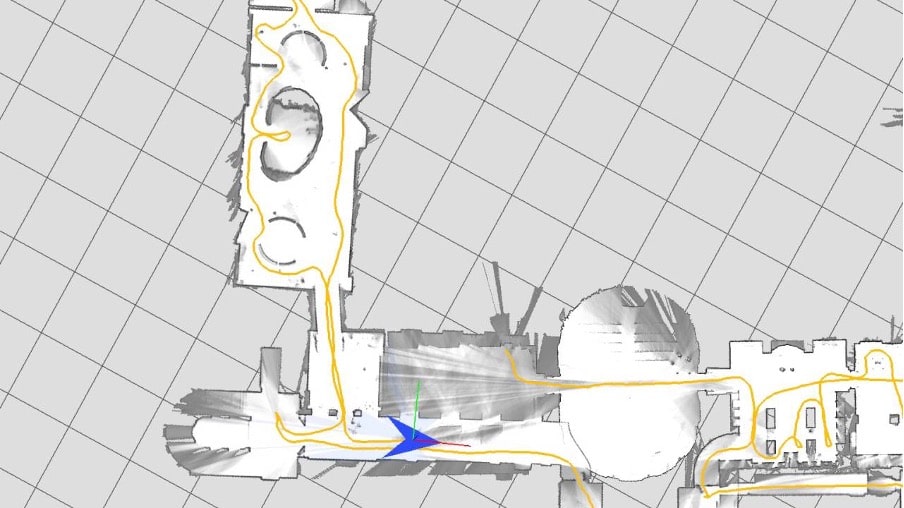
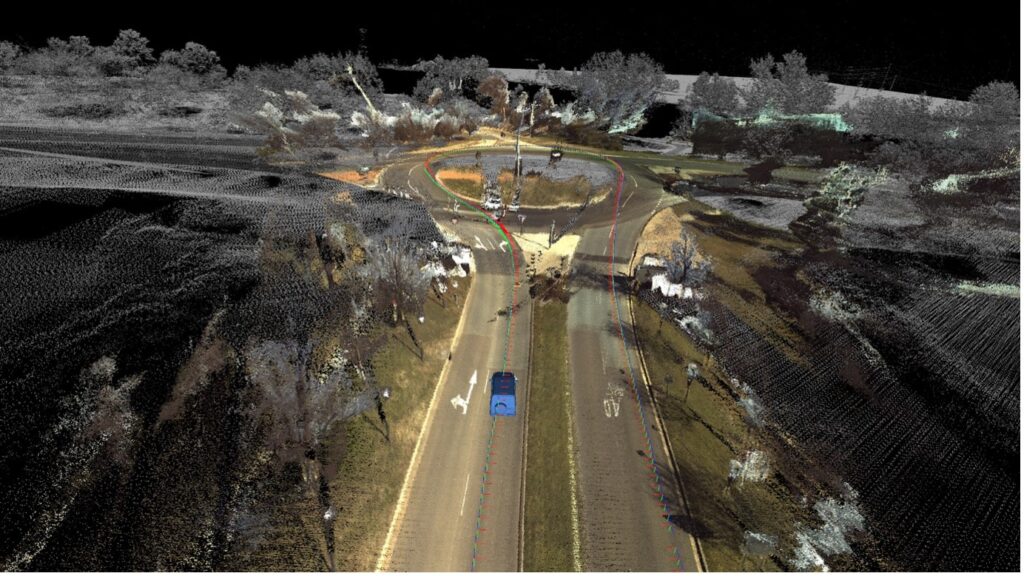
In 2D SLAM, the localisation of a robot at any instance is represented by two co-ordinates, (x and y) for position on a 2D map, and one rotation angle for orientation. As the complexity of the environment increases, this two-dimensional representation becomes limited. In 3D SLAM, the localisation of a robot at any instance is represented by three co-ordinates, (x, y and z) for position on a 3D map, and three rotation angles (yaw, pitch and roll), for orientation. While more complicated to compute, 3D SLAM includes more information to create a virtual model of our three-dimensional physical world, which is not just a flat surface.
Navigating challenging environments
3D SLAM becomes increasingly essential for outdoor environments, characterised by uneven terrains, varying elevations, and dynamic elements, which pose challenges that extend beyond the capabilities of 2D mapping. In off-road scenarios, where robots need to navigate through diverse landscapes with obstacles and changes in elevation, 3D SLAM is essential for creating detailed and accurate maps to ensure safe and efficient navigation.
A sense of depth
The key advantage of 3D SLAM lies in its ability to capture the depth information of the surroundings, providing a more comprehensive representation of the environment. This additional dimension enhances the system’s understanding of the world, allowing it to navigate through complex terrains with greater precision and adaptability. By incorporating depth perception, 3D SLAM systems can better handle scenarios where accurate distance measurements and three-dimensional mapping are crucial for successful navigation.
In summary, the choice between 2D and 3D SLAM hinges on the complexity of the environment in which a robotic and autonomous system operates. While 2D SLAM is often sufficient for simpler indoor environments, such as those navigated by robotic vacuum cleaners, 3D SLAM becomes imperative for more challenging outdoor or off-road scenarios. As technology continues to advance, we can expect 3D SLAM to play an increasingly integral role in the development of autonomous systems, pushing the boundaries of what is achievable in robotic perception and navigation.

Dr Samson Lee
Chief Technology Evangelist | Chief Technical Officer
Dr Samson Lee is an expert in leading computer vision, machine learning, imaging and streaming media projects in Sydney and New York. Dr Lee is one of the founders of Visionary Machines, where he works on Visionary Machines’ Perception systems featuring real-time Visual 3D SLAM.
Subscribe to our newsletter
Stay up-to-date with our latest news and product developments